

Conceitos e Exemplos de Movimentos Linear, Angular e Global: Conceitue E Dê Exemplo De Movimentos Linear Angular E Global
Conceitue E Dê Exemplo De Movimentos Linear Angular E Global – O movimento, em suas diversas formas, é um conceito fundamental na física e na engenharia. Compreender os diferentes tipos de movimento, suas características e interações, é crucial para analisar e prever o comportamento de objetos no mundo ao nosso redor. Neste artigo, exploraremos três tipos de movimento: linear, angular e global (ou de corpo rígido), fornecendo definições, exemplos e comparações para uma compreensão completa do assunto.
Movimento Linear
Movimento linear, também conhecido como movimento translacional, descreve o deslocamento de um objeto em linha reta ou curva, onde todos os pontos do objeto se movem na mesma direção e distância. Suas características principais incluem a distância percorrida, o tempo gasto e a velocidade (taxa de variação da distância em relação ao tempo). A aceleração, por sua vez, representa a taxa de variação da velocidade.
| Exemplo | Descrição | Equação Relevante | Ilustração Descritiva |
|---|---|---|---|
| Uma bola rolando em uma superfície plana | A bola desloca-se em linha reta com velocidade constante (se não houver atrito) ou variável (se houver atrito ou outras forças atuando). | d = vt (movimento uniforme) | Uma esfera lisa movendo-se ao longo de uma linha reta, sem rotação aparente. Sua trajetória é facilmente previsível e pode ser representada por uma linha reta. |
| Um carro em uma estrada reta | O carro se move em linha reta, sua velocidade podendo ser constante ou variar devido à aceleração ou desaceleração. | v = v0 + at (movimento uniformemente variado) | Um automóvel deslocando-se ao longo de uma via retilínea, com sua carroceria mantendo a mesma orientação. Sua trajetória é uma linha reta, mas sua velocidade pode mudar ao longo do tempo. |
| Uma bala disparada de uma arma | A bala segue uma trajetória aproximadamente linear, considerando a resistência do ar como desprezível em um curto intervalo de tempo. | d = v0t + (1/2)at² (movimento uniformemente variado) | Um projétil pequeno e alongado movendo-se em linha reta com alta velocidade. A resistência do ar é considerada mínima neste exemplo simplificado. |
| Uma pessoa caminhando em linha reta | O movimento linear do corpo humano, simplificado, considerando o deslocamento do centro de massa. | d = vt (aproximação para movimento uniforme) | Uma figura humana deslocando-se ao longo de uma linha reta, com passos constantes e sem rotações significativas do corpo. |
O movimento linear uniforme (MLU) caracteriza-se por velocidade constante, enquanto o movimento linear uniformemente variado (MLUV) apresenta aceleração constante. Ambos são casos particulares do movimento linear, com o MLU sendo um caso especial do MLUV onde a aceleração é zero.
Movimento Angular, Conceitue E Dê Exemplo De Movimentos Linear Angular E Global
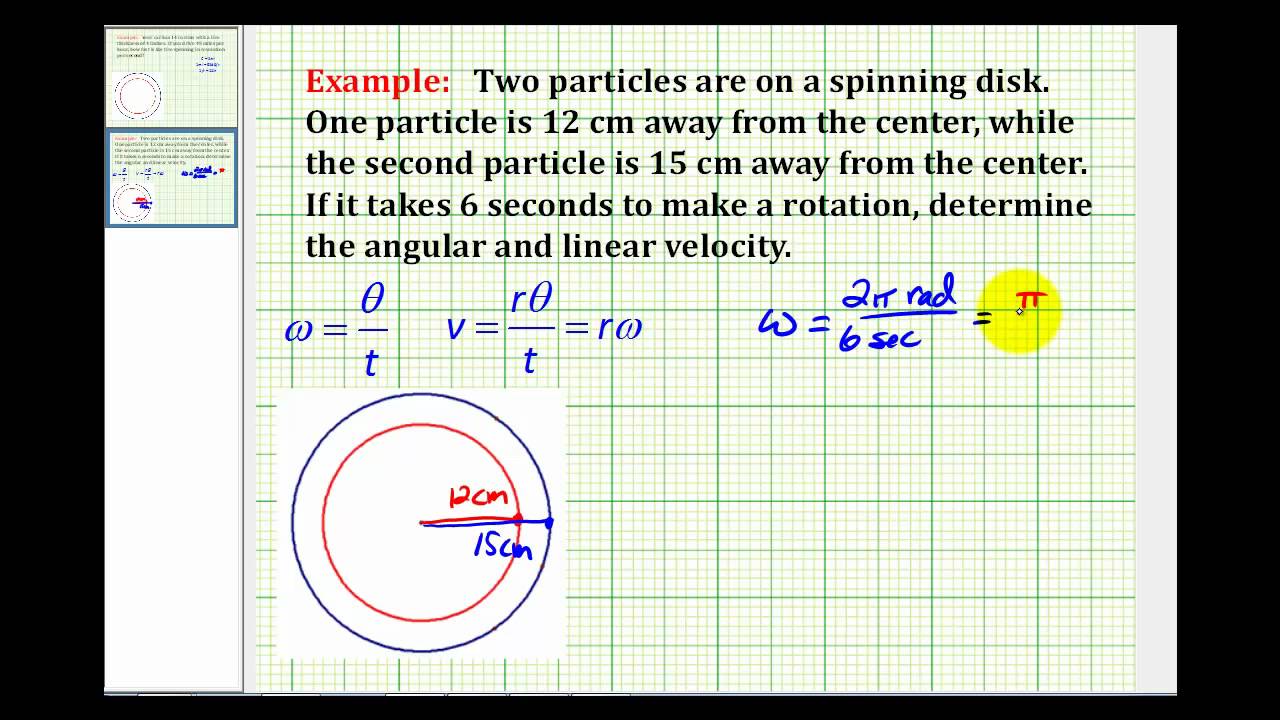
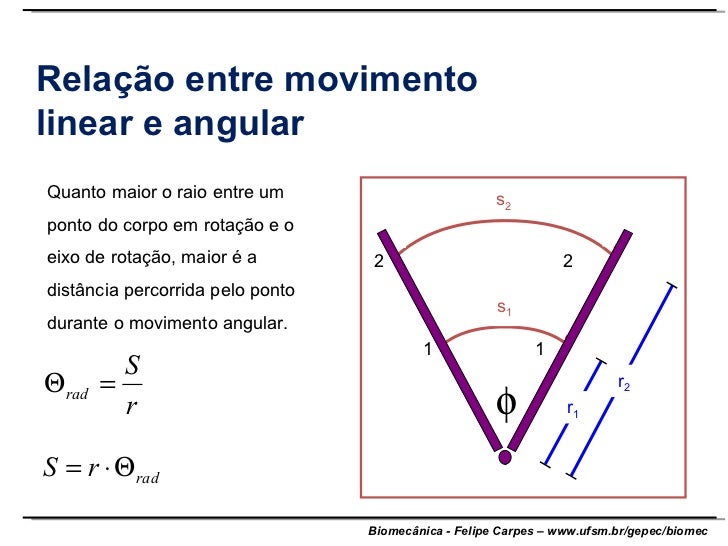
Movimento angular, ou movimento rotacional, descreve a rotação de um objeto em torno de um eixo. A velocidade angular mede a taxa de variação do ângulo em relação ao tempo, enquanto a aceleração angular mede a taxa de variação da velocidade angular. A relação entre movimento angular e linear é crucial, sendo a distância linear percorrida por um ponto num corpo em rotação diretamente proporcional à distância radial ao eixo de rotação e ao ângulo percorrido.
- Rotação de um planeta: A Terra gira em torno de seu eixo, causando a sucessão do dia e da noite.
- Movimento de um pêndulo: O pêndulo oscila em um arco, exibindo movimento angular.
- Rotação de uma roda: A rotação de uma roda de um veículo, essencial para seu deslocamento.
- Movimento de um giroscópio: O giroscópio demonstra estabilidade rotacional, resistindo a mudanças em sua orientação.
- Rotação de uma turbina: As pás de uma turbina giram para gerar energia.
Movimento Global (Movimento de Corpo Rígido)
Um corpo rígido é um objeto idealizado onde a distância entre quaisquer dois pontos permanece constante, independentemente das forças aplicadas. Seu movimento é descrito por uma combinação de translação e rotação. Um corpo rígido no espaço tridimensional possui seis graus de liberdade: três para translação (deslocamento ao longo dos eixos x, y e z) e três para rotação (em torno dos eixos x, y e z).
| Translação | Rotação |
|---|---|
| Deslocamento linear de um corpo sem mudança de orientação. | Mudança na orientação de um corpo em torno de um eixo, sem deslocamento linear do centro de massa. |
Exemplos Integrados dos Três Tipos de Movimento
Muitos movimentos do mundo real envolvem a combinação dos três tipos de movimento. A seguir, alguns exemplos ilustram essa interação.
Exemplo 1: Uma bola arremessada
Movimento Linear: A bola se move em uma trajetória parabólica.
Movimento Angular: A bola pode girar em torno de seu próprio eixo durante o arremesso.
Movimento Global: A combinação da translação (trajetória parabólica) e da rotação (giro da bola) descreve o movimento completo da bola.
Exemplo 2: Um carro fazendo uma curva
Movimento Linear: O carro se move para frente, embora a direção esteja mudando.
Movimento Angular: As rodas giram e o carro rotaciona em torno de um ponto na curva.
Movimento Global: A combinação da translação (movimento para frente) e rotação (curva) define o movimento do carro.
Exemplo 3: Um avião em voo
Movimento Linear: O avião se move para frente em relação ao solo.
Movimento Angular: O avião pode inclinar-se para fazer curvas, mudando sua orientação.
Movimento Global: A combinação da translação e rotação descreve o movimento complexo do avião no espaço tridimensional.
Comparação entre os Movimentos
O movimento linear é descrito pela posição, velocidade e aceleração em uma linha reta ou curva. O movimento angular é descrito pelo ângulo, velocidade angular e aceleração angular em relação a um eixo de rotação. O movimento global combina translação e rotação para descrever o movimento de um corpo rígido. Cada tipo de movimento é predominante em diferentes situações, mas frequentemente eles interagem para criar movimentos complexos do mundo real.
Ao concluir nossa análise de movimentos linear, angular e global, fica evidente a riqueza e complexidade que residem na aparente simplicidade do movimento. De movimentos aparentemente simples a sistemas intrincados, a compreensão desses conceitos é fundamental para a resolução de problemas em diversas áreas do conhecimento, desde a engenharia e a robótica até a astronomia e a biomecânica. A interação entre esses tipos de movimento nos permite descrever e prever o comportamento de objetos e sistemas, abrindo caminho para inovações tecnológicas e uma compreensão mais profunda do universo que nos rodeia.
A beleza da física reside na sua capacidade de desvendar os mistérios do movimento, revelando a ordem subjacente à aparente complexidade do mundo.